
ထုပ်ပိုးမှုစက်ရုပ်ဉာဏ်ရည်ဥာဏ်သွေး ထောက်လှမ်းခြင်းစနစ်များ၊ ထုပ်ပိုးမှုဆိုင်ရာ ခြယ်လှယ်မှုများ၊ ကိုင်တွယ်ခြယ်လှယ်မှုများ၊ stacking စနစ်များနှင့် ထိန်းချုပ်မှုစနစ်များ စသည်တို့ပါ၀င်သည့် အဆင့်မြင့်၊ ဉာဏ်ရည်ထက်မြက်ပြီး အလိုအလျောက် မြင့်မားသော အလိုအလျောက်စက်ကိရိယာများဖြစ်သည်။ ၎င်းသည် ရိုးရာလက်စွဲလုပ်ဆောင်မှုများကို အစားထိုးပြီး ထုတ်ကုန်သယ်ယူပို့ဆောင်ရေး၊ စီခွဲခြင်း၊ ထောက်လှမ်းခြင်း၊ ထုပ်ပိုးခြင်း၊ တင်ခြင်းနှင့် လွှတ်တင်ခြင်းစသည့် လင့်ခ်များစွာကို သိရှိနားလည်စေသည်။ ၎င်းသည် မြင့်မားသောအလုပ်ထိရောက်မှုနှင့် တိကျသောလည်ပတ်မှု၏အားသာချက်များရှိပြီး လူအင်အား၊ အချိန်နှင့် အခြားကုန်ကျစရိတ်များကို ထိရောက်စွာ သက်သာစေနိုင်ပြီး အစားအသောက်လုပ်ငန်းတွင် တွင်ကျယ်စွာအသုံးပြုလျက်ရှိသည်။ အမျိုးအစားခွဲခြားခြင်း။ထုပ်ပိုးစက်ရုပ်များ

ကုန်ပစ္စည်းထုပ်ပိုးမှုတွင် ယေဘုယျအားဖြင့် ပုံစံများစွာရှိသည်။ အရာဝတ္ထု၏ ပုံသဏ္ဍာန်၊ ပစ္စည်း၊ အလေးချိန်နှင့် သန့်ရှင်းမှု လိုအပ်ချက်များအရ ထုပ်ပိုးမှုလုပ်ငန်းစဉ်သည် အတော်လေး ရှုပ်ထွေးပါသည်။ လက်ရှိတွင်၊ ဤထုပ်ပိုးမှုလုပ်ငန်းစဉ်အတွက် အဓိကအားဖြင့် အောက်ပါ စက်ရုပ်အမျိုးအစားများ ရှိပါသည်။
အိတ်ဆွဲစက်ရုပ်- အိတ်ဆွဲစက်ရုပ်သည် ၃၆၀ ဒီဂရီ လှည့်ပတ်သော ကိုယ်ထည်ဖြင့် ပုံသေ rotary အမျိုးအစားဖြစ်သည်။ စက်ရုပ်သည် သယ်ယူပို့ဆောင်ရေး၊ အိတ်ဖွင့်ခြင်း၊ မီတာတိုင်းတာခြင်း၊ ဖြည့်သွင်းခြင်း၊ အိတ်ချုပ်ခြင်းနှင့် ထုပ်ပိုးထားသော အိတ်များကို ထုပ်ပိုးခြင်းတို့ကို ပြီးမြောက်စေသည်။ ၎င်းသည် ဉာဏ်ရည်မြင့်မားသော ထုပ်ပိုးသည့် စက်ရုပ်ဖြစ်သည်။ လက်ဝှေ့စက်ရုပ်- အိတ်ထုတ်စက်ရုပ်ကဲ့သို့ပင်၊ သတ္တုနှင့် ဖန်ထုပ်ပိုးသည့် ကွန်တိန်နာများ၏ လက်ဝှေ့ပွဲကို ယေဘုယျအားဖြင့် တောင့်တင်းသောသေတ္တာစက်ရုပ်ဖြင့် ပြီးမြောက်စေသည်။ ထုပ်ပိုးမှုကို ဖမ်းယူရန်အတွက် စက်နှင့် လေစုပ်ခြင်း အမျိုးအစား နှစ်မျိုးရှိသည်။ တစ်ခုလုံး ရွေ့လျားနိုင်သည်။ အထုပ်ကိုဆွဲယူပါ သို့မဟုတ် စုပ်ယူပြီးနောက် သတ်မှတ်ထားသော အနေအထားတွင် ထုပ်ပိုးမှုသေတ္တာ သို့မဟုတ် ပက်လက်ထဲသို့ ပေးပို့ပါ။ ၎င်းတွင် အလိုအလျောက် ဦးတည်ချက်နှင့် အနေအထား ချိန်ညှိခြင်း လုပ်ဆောင်ချက် ပါရှိပြီး ဘောက်စ် (pallet) မပါဘဲ ချွတ်ချခြင်းနှင့် ဦးတည်ချက် ချိန်ညှိခြင်းတို့ကို သိရှိနိုင်သည်။ ဤစက်ရုပ်အမျိုးအစားသည် အပလီကေးရှင်းများစွာပါဝင်သော အတော်လေးရင့်ကျက်သော စက်ရုပ်ဖြစ်သည်။ အဖျော်ယမကာ၊ ဘီယာစသည်ဖြင့်၊
Filling စက်ရုပ်- ၎င်းသည် ထုပ်ပိုးမှုတွင် အရည်ပစ္စည်းများ ပြည့်သွားပြီးနောက် ထုပ်ပိုးမှုတွင် ထုပ်ပိုးထားသော ကွန်တိန်နာကို တိုင်းတာ၊ အထုပ်များ၊ ဖိထားသော (ဝက်အူများ) နှင့် တိုင်းတာသည့် စက်ရုပ်ဖြစ်သည်။ ၎င်းတွင် ပုလင်းမပါဘဲ အစာမကျွေးခြင်း၊ ဦးထုပ်မပါသော အစာမကျွေးခြင်း၊ ကွဲနေသော ပုလင်းသတိပေးချက်နှင့် အလိုအလျောက် ငြင်းပယ်ခြင်း စသည့် လုပ်ဆောင်ချက်များ ပါဝင်သည်။ ယခင်က ကျွန်ုပ်တို့၏အရည်ပစ္စည်းများအများအပြားကို ဤစက်ရုပ်၏ ဒေသဆိုင်ရာလုပ်ဆောင်ချက်ဖြင့် အဓိကအားဖြည့်ထားပါသည်- အဆိုပါခြယ်လှယ်မှုကို ထုတ်လုပ်မှုလိုင်းတွင် ထည့်သွင်းထားသည်။ ယခုအခါ၊ ဤစက်ရုပ်သည် ၎င်း၏အလိုအလျောက်ဖြည့်သွင်းမှုကို သိရှိနိုင်ရန် ပစ္စည်းထုတ်လုပ်ရေးအိမ်ရှင်၏ အနောက်ဘက်တွင် တိုက်ရိုက်ဖွဲ့စည်းထားပါသည်။ ဖြည့်စက်ရုပ်များကို ပျော့ပျောင်းသောထုပ်ပိုးခြင်းနှင့် ခဲထုပ်ပိုးခြင်းဟူ၍ ခွဲခြားထားသည်။ မာကျောသောထုပ်ပိုးမှု (ပုလင်း) ဖြည့်စက်ရုပ်ကို ဤနေရာတွင် ခွဲခြမ်းစိတ်ဖြာထားသည်။
ထုပ်ပိုးခြင်းဆိုင်ရာ စက်ရုပ်- ထုပ်ပိုးခြင်းလုပ်ငန်းတွင် ဤစက်ရုပ်အမျိုးအစားသည် အဓိကအားဖြင့် ပလပ်စတစ်ပုလင်းထုပ်ပိုးခြင်းနှင့် သယ်ဆောင်ခြင်းအတွက် အသုံးပြုသည့် စက်ရုပ်ကို ရည်ညွှန်းသည်။ ၎င်းသည် ပုလင်းများ (ပုလင်းအလွတ်များ) သယ်ဆောင်ခြင်းကို နားလည်ရန် စွမ်းအားနှင့် အထူးအစိတ်အပိုင်းများကို အသုံးပြု၍ လျင်မြန်စွာ ထွက်ရှိပြီး ပုလင်းစည်အတွင်းရှိ ထုပ်ပိုးထားသော ပုလင်းများကို စီစဉ်ပေးကာ တိကျသော (ဦးတည်ချက်၊ အရွယ်အစား) စွမ်းအားကို ပေးသည်။ ပုလင်းကိုယ်ထည်အား လေထဲတွင် ပါရာဘိုလာလမ်းကြောင်းကို တိကျစွာ ဖြတ်၍ ဖြည့်ထားသော အလုပ်ခွင်သို့ရောက်ရှိအောင် ပြုလုပ်ပါ။ ဤစက်ရုပ်သည် ရိုးရာပုလင်းသယ်ယူခြင်း ယန္တရားကို ပြောင်းလဲစေသည်။ ၎င်းသည် သယ်ယူသည့်အမြန်နှုန်းကို မြှင့်တင်ပေးပြီး သယ်ဆောင်သည့်နေရာကို လျှော့ချပေးသည်။ ၎င်းသည် အယူအဆအသစ်ဖြင့် ထုပ်ပိုးသည့် စက်ရုပ်ဖြစ်သည်။ ၎င်းသည် ၎င်း၏ သယ်ဆောင်ခြင်းလုပ်ငန်းကို အောင်မြင်ရန် လေခွင်းအားနှင့် အထူးစက်ပိုင်းဆိုင်ရာ အစိတ်အပိုင်းများကို အသုံးပြုသည်။
ထုပ်ပိုးစက်ရုပ်များ၏အားသာချက်များ
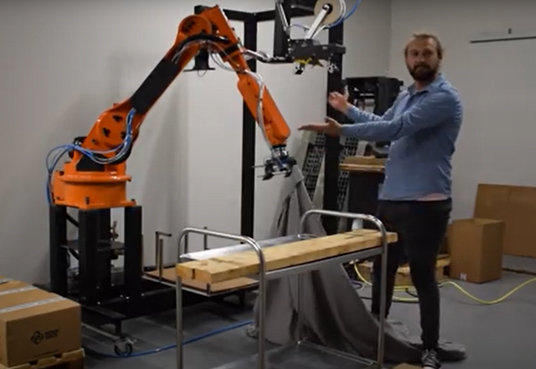
1. ထုတ်လုပ်မှုတိကျမှု စက်ရုပ်လက်မောင်းကို ခိုင်မာသောစက်အခြေခံပေါ်တွင် တပ်ဆင်ထားပြီး၊ ဝင်ရိုးပေါင်းစုံ စက်ရုပ်၏ဝင်ရိုးများကို servo မော်တာများနှင့် ဂီယာများဖြင့် လှည့်ပတ်ထားသောကြောင့် စက်ရုပ်သည် အလုပ်လုပ်သည့်အချင်းဝက်အတွင်း အလုပ်နေရာအား လိုက်လျောညီထွေရှိပြီး လွတ်လပ်စွာ ဆုံးဖြတ်နိုင်မည်ဖြစ်သည်။
2. လည်ပတ်ရလွယ်ကူမှု စနစ်သည် PLC မှတဆင့် စက်ရုပ်၊ စက်ဆုပ်ကိုင်ကိရိယာ နှင့် သယ်ယူပို့ဆောင်ရေးခါးပတ်တို့ကို ထိန်းချုပ်ပြီး ထုတ်လုပ်မှုလုပ်ငန်းစဉ်အတွင်း အချက်အလက်ပြသရန် အထူးထိတွေ့မျက်နှာပြင်တစ်ခု တပ်ဆင်ထားပါသည်။ စနစ်သည် အဆင့်မြင့်လူသား-စက်မျက်နှာပြင်ကို လက်ခံထားပြီး အော်ပရေတာများသည် ဘောင်များကို အလွယ်တကူမွမ်းမံပြင်ဆင်နိုင်ပြီး အင်တာဖေ့စ်ပေါ်ရှိ ပရိုဂရမ်များကို ရွေးချယ်နိုင်သည်။
3. ထုတ်လုပ်မှု လိုက်လျောညီထွေမှု စက်ရုပ်၏ လက်ကိုင်ပရိုကို အနားကွပ်၏ အလယ်တွင် တပ်ဆင်ထားသည်။ ၎င်းကို ပုံသေကိရိယာအဖြစ် ဒီဇိုင်းထုတ်ခြင်း သို့မဟုတ် အထူးလုပ်ဆောင်စရာများနှင့် လိုက်လျောညီထွေဖြစ်အောင် အလိုအလျောက်လက်ပြောင်းစက်မှတဆင့် မတူညီသော ပရော်ဖက်ရှင်နယ် လက်ကိုင်ပရိုများဖြင့် အစားထိုးနိုင်သည်။ စက်ရုပ်သည် လိုက်လျောညီထွေရှိသော ထုတ်လုပ်မှုလိုအပ်ချက်များကို ဖြည့်ဆည်းရန် အမှန်တကယ် ထုတ်လုပ်မှု လုပ်ငန်းစဉ်၏ လိုအပ်ချက်များနှင့်အညီ မတူညီသော ဂရစ်ပါများကို အစားထိုး တပ်ဆင်နိုင်သည်။ စက်ရုပ်သည် workpiece အမျိုးအစားကို ခွဲခြားသိရှိနိုင်ပြီး စက်ရုပ်သည် workpiece ကိုရှာရန် ကူညီပေးရန်အတွက် လေဆာအမြင်စစ်ဆေးရေးစနစ်နှင့်လည်း ပူးပေါင်းဆောင်ရွက်နိုင်ပါသည်။
ထုပ်ပိုးစက်ရုပ်များ၏အင်္ဂါရပ်များ
1. ခိုင်ခံ့စွာအသုံးချနိုင်မှု- လုပ်ငန်းမှထုတ်လုပ်သည့်ထုတ်ကုန်များ၏ အရွယ်အစား၊ ထုထည်၊ ပုံသဏ္ဍာန်နှင့် ပြင်ပအတိုင်းအတာများ ပြောင်းလဲသောအခါ၊ ထိတွေ့မျက်နှာပြင်ပေါ်တွင် အနည်းငယ် ပြုပြင်မွမ်းမံရန် လိုအပ်ပြီး လုပ်ငန်း၏ပုံမှန်ထုတ်လုပ်မှုကို ထိခိုက်မည်မဟုတ်ပါ။ သမားရိုးကျစက်မှုပစ္စည်း palletizers အပြောင်းအလဲသည်အတော်လေးဒုက္ခသို့မဟုတ်မဖြစ်နိုင်ပါ။ 2. ယုံကြည်စိတ်ချရမှု မြင့်မားသည်- ထုပ်ပိုးစက်ရုပ်သည် ထပ်ခါတလဲလဲ လည်ပတ်နေချိန်အတွင်း တူညီသောအခြေအနေကို အမြဲထိန်းသိမ်းထားနိုင်ပြီး လူသားများနှင့် ဆင်တူသော ပုဂ္ဂလဓိဋ္ဌာန်ဝင်စွက်ဖက်မှုမျိုး ရှိမည်မဟုတ်သောကြောင့် ၎င်း၏လုပ်ငန်းဆောင်တာ ယုံကြည်စိတ်ချရမှုသည် အတော်လေးမြင့်မားပါသည်။
3. မြင့်မားသော အလိုအလျောက်စနစ်- ထုပ်ပိုးစက်ရုပ်၏ လည်ပတ်မှုသည် လူသားပါဝင်မှုမရှိဘဲ၊ အလိုအလျောက်စနစ်၏ မြင့်မားသော ဒီဂရီဖြင့် ထုပ်ပိုးသည့် စက်ရုပ်၏ လည်ပတ်မှုသည် လုပ်သားများစွာကို သက်သာစေသည်။
4. ကောင်းမွန်တိကျမှု- ထုပ်ပိုးစက်ရုပ်၏ လည်ပတ်ထိန်းချုပ်မှုသည် တိကျပြီး ၎င်း၏တည်နေရာအမှားသည် အခြေခံအားဖြင့် မီလီမီတာအဆင့်အောက်တွင်ရှိပြီး အလွန်တိကျကောင်းမွန်ပါသည်။
5. စွမ်းအင်သုံးစွဲမှုနည်းခြင်း- များသောအားဖြင့် စက်ပစ္စည်းအလွှာလိုက်စက်၏ ပါဝါသည် 26KW ဝန်းကျင်ရှိပြီး ထုပ်ပိုးစက်ရုပ်တစ်ရုပ်၏ ပါဝါမှာ 5KW ဝန်းကျင်ဖြစ်ပြီး သုံးစွဲသူများ၏ လည်ပတ်မှုကုန်ကျစရိတ်ကို များစွာလျှော့ချပေးသည်။
6. ကျယ်ပြန့်သောအသုံးချပရိုဂရမ်များ- ထုပ်ပိုးစက်ရုပ်ကို တွင်ကျယ်စွာအသုံးပြုသည်။ ၎င်းသည် ဖမ်းယူခြင်း၊ ကိုင်တွယ်ခြင်း၊ တင်ခြင်းနှင့် ဖြုတ်ချခြင်း နှင့် stacking ကဲ့သို့သော လုပ်ဆောင်မှုများစွာကို အပြီးသတ်နိုင်သည်။
7. မြင့်မားသောထိရောက်မှု- ထုပ်ပိုးစက်ရုပ်၏လုပ်ဆောင်မှုအမြန်နှုန်းသည် အတော်လေးမြန်ပြီး အချိန်အနှောက်အယှက်မရှိသောကြောင့် ၎င်း၏လုပ်ငန်းဆောင်တာထိရောက်မှုမှာ အတော်လေးမြင့်မားပါသည်။
8. သေးငယ်သောခြေရာ- ထုပ်ပိုးစက်ရုပ်အား ကျဉ်းမြောင်းသောနေရာတစ်ခုတွင် တပ်ဆင်နိုင်ပြီး ဖောက်သည်၏စက်ရုံရှိ ထုတ်လုပ်မှုလိုင်းပုံစံကို အထောက်အကူဖြစ်စေပြီး ပိုကြီးသောဂိုဒေါင်ဧရိယာကို ချန်ထားနိုင်သည်။
ယနေ့ခေတ်တွင် ထုပ်ပိုးမှုလုပ်ငန်းသည် automation ခေတ်သို့ တဖြည်းဖြည်းဝင်ရောက်လာပါသည်။ အလိုအလျောက်စနစ်နည်းပညာ၏ ပြိုင်ဆိုင်မှုအရှိဆုံး သရုပ်သဏ္ဍာန်အနေဖြင့် စက်မှုစက်ရုပ်များသည် ထပ်တလဲလဲ၊ မြန်ဆန်၊ တိကျပြီး အန္တရာယ်ရှိသော လုပ်ငန်းစဉ်များအတွက် အလွန်သင့်လျော်ပါသည်။ ထုပ်ပိုးသည့် စက်ရုပ်များကို အသုံးချခြင်းသည် ကုန်ကျစရိတ်ကို လျှော့ချရုံသာမက ပိုမိုထိရောက်သော ပျော့ပြောင်းမှုကိုလည်း ယူဆောင်လာနိုင်သည်။ စက်ရုပ်စက်ရုပ်များကို ထုပ်ပိုးခြင်းသာမက၊ ကုမ္ပဏီများစွာသည် ၎င်းတို့၏ ပျော့ပြောင်းမှုနှင့် ယုံကြည်စိတ်ချရမှုတို့ကြောင့် မတူညီသောစက်မှုစက်ရုပ်များကို အသုံးပြုရန် ရွေးချယ်ကြသည်။ အနာဂတ်တွင် စက်မှုလုပ်ငန်းသုံး စက်ရုပ်များသည် ရိုးရာစက်ပစ္စည်းများကို အစားထိုးပြီး နယ်ပယ်အသီးသီး၏ ဖွံ့ဖြိုးတိုးတက်မှုအတွက် အရေးပါသော မောင်းနှင်အားများထဲမှ တစ်ခုဖြစ်လာမည်ဖြစ်သည်။
ပို့စ်အချိန်- Nov-20-2024





